

Development of unmanned vehicles by students
Student
Find Information you need.Topics of diploma theses
If you do not have an idea for a diploma thesis project, you can use the proposed topics.
Consultation plan
If you have problems with understanding a given topic, you can take advantage of consultations with our lecturers.
Useful documents
Here you will find subject cards, study plans and other documents.
Staff
Our staff includes experienced lecturers.Labolatories
Our department has very well equipped laboratories.
PLC Programmers

Robotics

Automation

Electronics

Power electronics
Projects
Familiarize yourself with the projects implemented in our department."Competition and implementation of unmanned vehicle systems part 2"
"Competition and implementation of unmanned vehicle systems"
Competition for the development and implementation of the design of unmanned systems
"Work of Apprentices group II"
Work done by our apprentices from the chłodniczych i ekeltrycznych school in Gdynia
"Work of Apprentices group I"
Work done by our apprentices from the chłodniczych i ekeltrycznych school in Gdynia
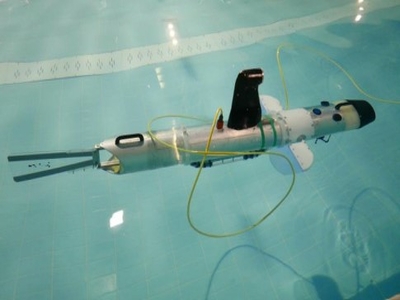
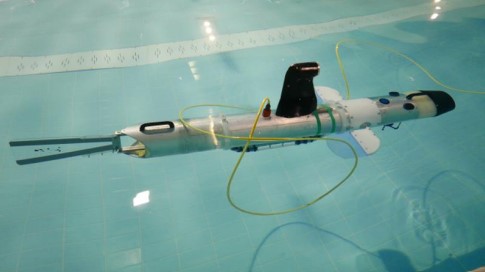
"Śledzik"
Autonomous underwater vehicles with silent wave propulsion for underwater reconnaissancea
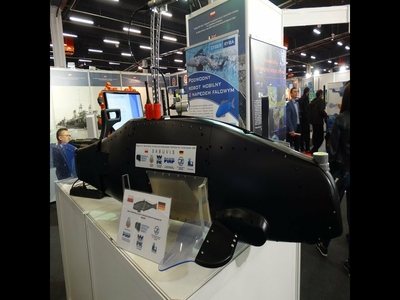
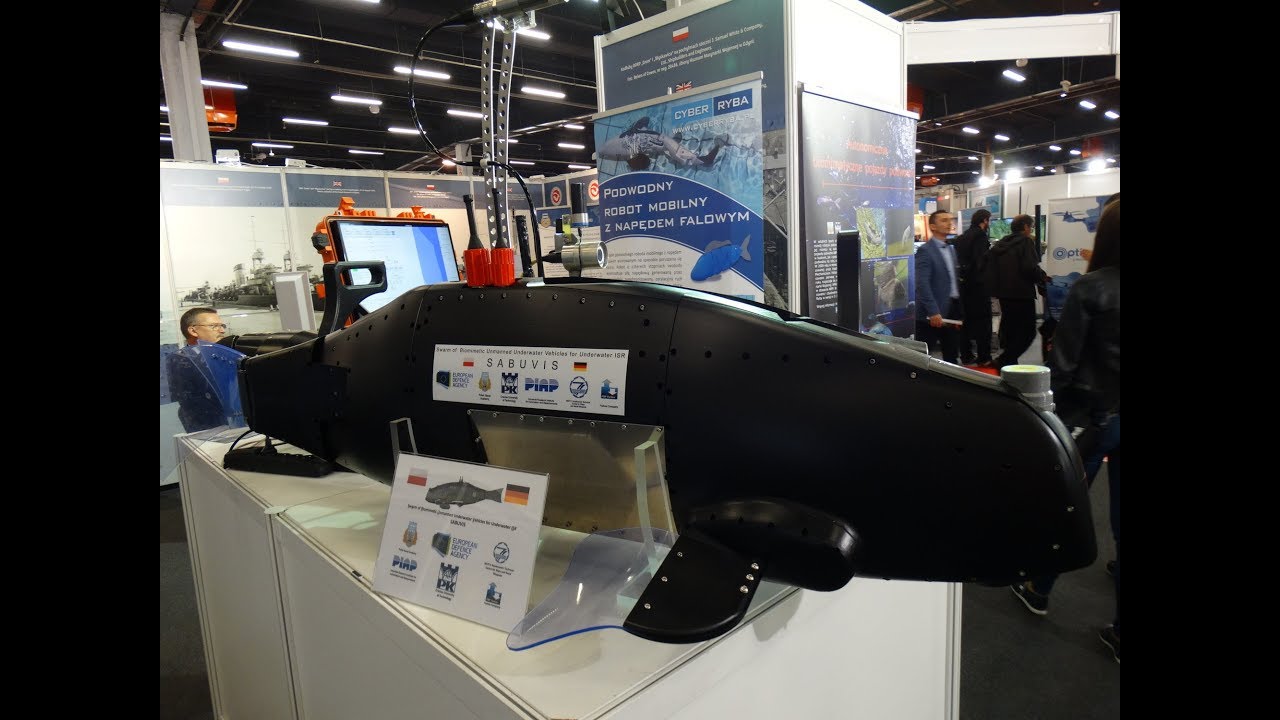
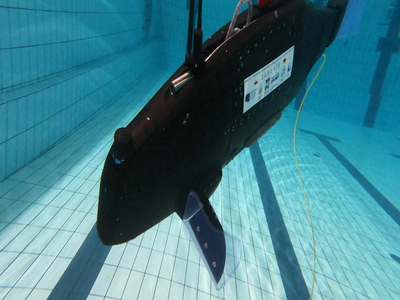
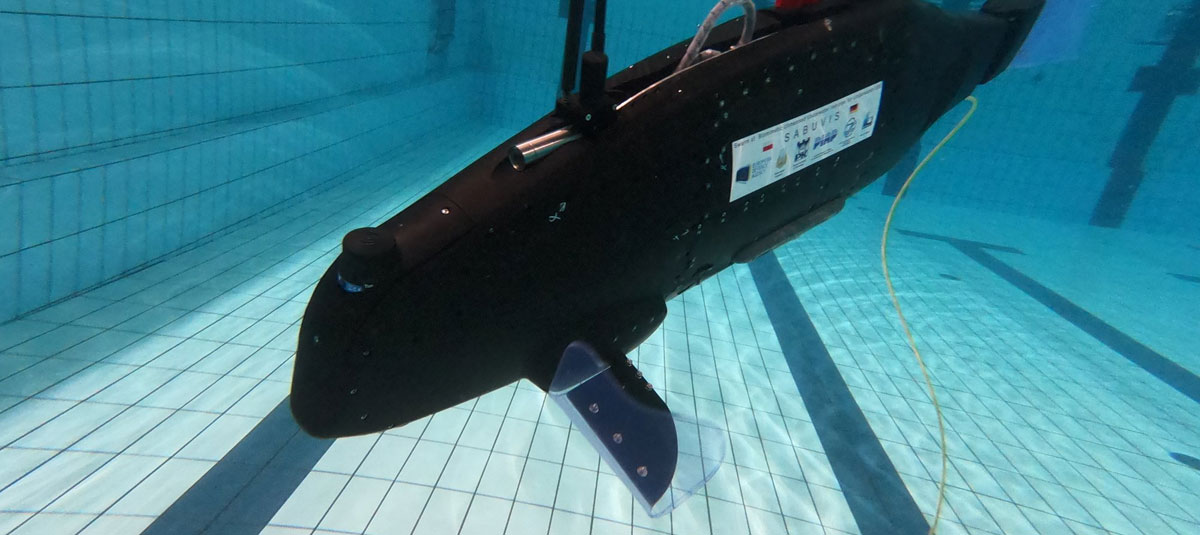
"SABUVIS"
Swarm of Biomimetic Underwater Vehicles for Underwater ISR
"Bolero"
BMulti-variant floating platform for protection activities of maritime state services

"Projekt XII"
Integrated perimeter protection and monitoring planning system maritime ports and critical facilities based on autonomous unmanned vessels

"Hadar"
Optical-thermal kit for recognition and identification of surface floating objects and low-flying air objects for the needs of technical observation points of the sea basin
-
Vision system for the analysis of movement and position of objects in the marine environmenta
Photonews
Check what is happening with us.
We invite you to register for the free MATLAB EXPO 2023 online conference.
Registration link in the link.
02 May 2023
02 May 2023

Students of the Department of Ship Automation on the latest minehunter ORP MEWA
more information in the link.
26 April 2023
26 April 2023

An employee of the Department of Ship Automation is a laureate of the "Young Innovative 2023" competition
more information in the link.
24 April 2023
24 April 2023

Special offer WME
more information in the link.
06 April 2023
06 April 2023

Success of the Naval Academy team!
more information in the link.
12 December 2021
12 December 2021
Invitation to the ONT conference, details in the link.
13 June 2021
13 June 2021

Awards in the competition of the Ministry of National Defense for an unmanned marine system.
08 Dec 2021
08 Dec 2021

{kind=link}
Invitation to the seminar „MATLAB na wyciągnięcie ręki”
25 may 2021
25 may 2021
{kind=link}
Meeting with the graduate WME(192MCM, 192MCA, 182MCA, 202MCM, 202MCA)
24 may 2021
24 may 2021

{kind=link}
The outcome of the first stage of the competition of the Ministry of National Defence
6 April 2021
6 April 2021
{kind=link}
It can pretend to be a fish or a seal. Herring will be incorporated into the Navy?
26 October 2016
26 October 2016

{kind=link}
Poles are building an underwater drone. It will have fins and a tail!
18 october 2016
18 october 2016
{kind=link}
Conference on automation and operation of control and communication systems
09-11 October 2019
09-11 October 2019

{kind=link}
The first underwater drone in Poland is being built in Gdańsk:
18 October 2016
18 October 2016
{kind=link}
Cyber Fish Naval Drone SABUVIS MSPO 2017 Kielce presentation
07 September 2017
07 September 2017

{kind=link}
Cybernetic seal mirrors bottom
01 January 2019
01 January 2019
{kind=link}
SABUVIS – a shoal of biomimetic vehicles for preliminary reconnaissance tasks (PACTT na Impact'18)
8 June 2018
8 June 2018

{kind=link}
Fish-robots as a Polish specialty
15 October 2018
15 October 2018
Partners
Meet our partners.