| Temat |
Wykładowca |
Stopień studiów |
Realizacja |
| Opracowanie i badanie algorytmu opartego o logikę rozmytą doboru nastaw regulatora PID |
dr hab. inż.
Jerzy Garus |
I |
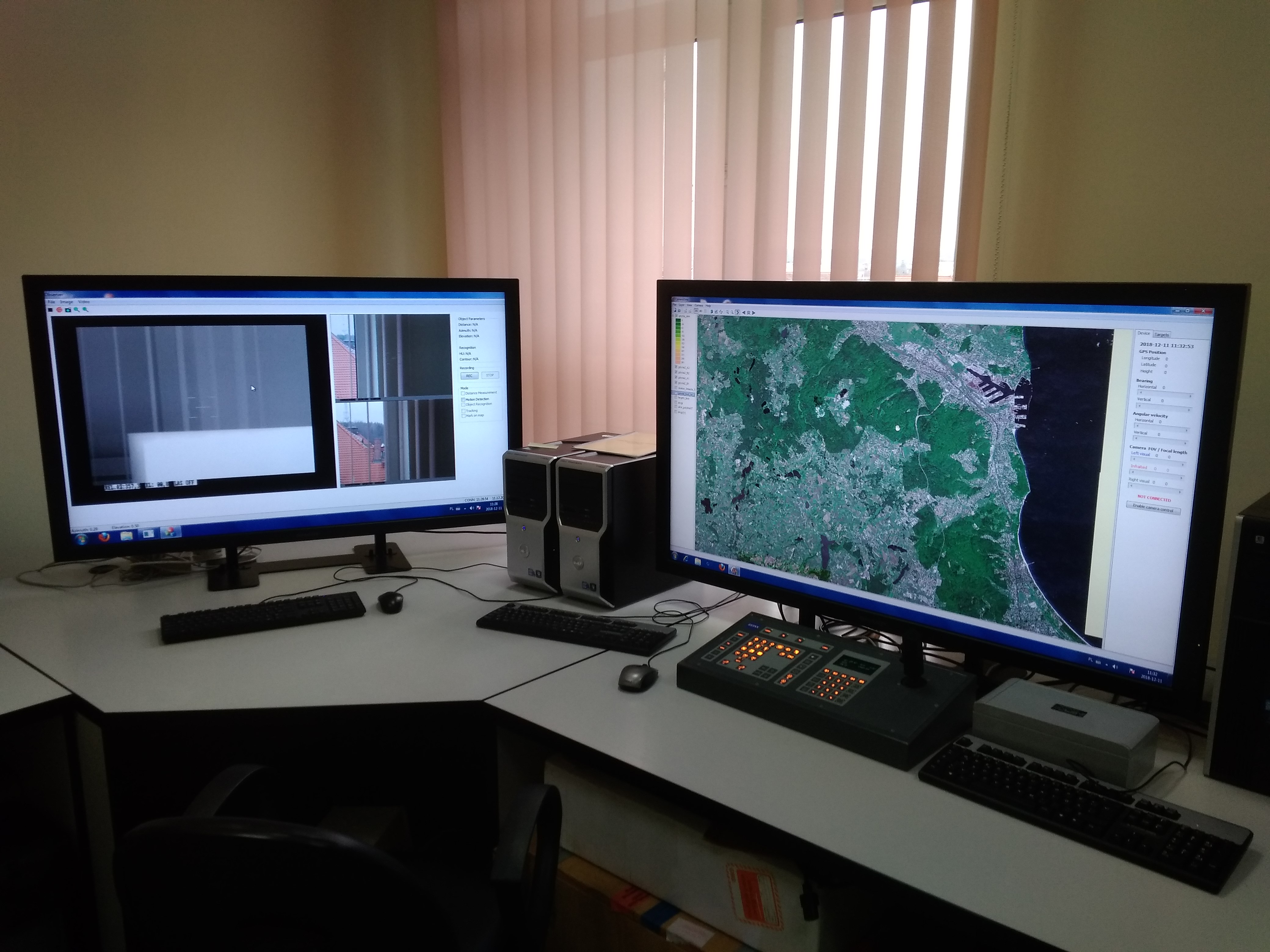
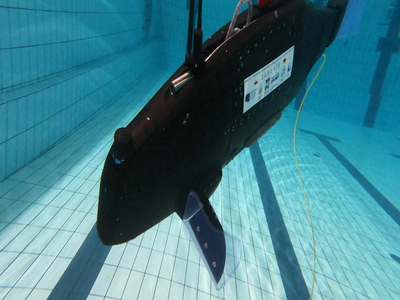
| Rejestrator parametrów ruchu pojazdu podwodnego |
dr hab. inż.
Jerzy Garus |
I |
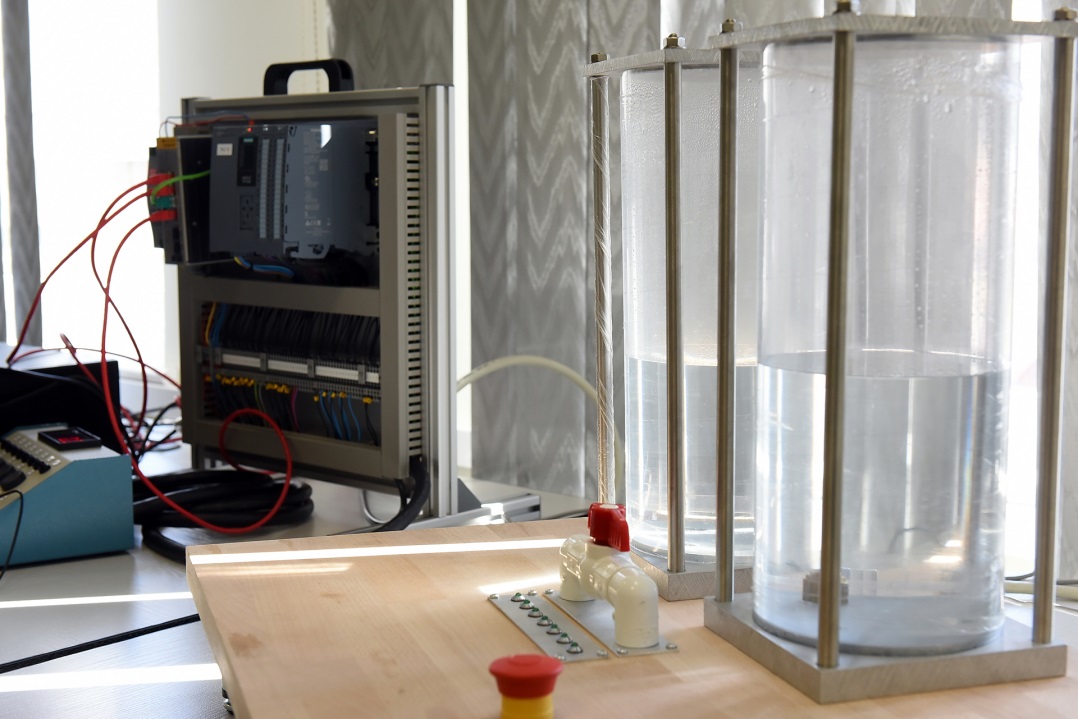
| Projekt i wykonanie stanowiska laboratoryjnego do programowania systemów automatyki przemysłowej z wykorzystaniem środowiska Factory IO |
dr inż.
Stanisław Hożyń |
I |
Projekt i wykonanie stanowiska laboratoryjnego do programowania systemów automatyki przemysłowej z wykorzystaniem systemu wizyjnego i sterownika PLC |
dr inż.
Stanisław Hożyń |
I |
| Projekt i wykonanie stanowiska do pomiaru odległości z wykorzystaniem systemu stereowizyjnego |
dr inż.
Stanisław Hożyń |
I |
| Projekt i wykonanie stanowiska laboratoryjnego do programowania automatyki stacji sortującej z wykorzystaniem sterownika PLC oraz oprogramowania Factory IO |
dr inż.
Stanisław Hożyń |
I |
| Projekt i implementacja aplikacji do rozpoznawania gestów na obrazach wizyjnych z wykorzystaniem sztucznych sieci neuronowych |
dr inż.
Stanisław Hożyń |
I |
| Projekt i implementacja aplikacji do detekcji osób na obrazach wizyjnych z wykorzystaniem sztucznych sieci neuronowych |
dr inż.
Stanisław Hożyń |
I |
| Analiza i ocena wybranych algorytmów rozpoznawania twarzy na obrazach wizyjnych |
dr inż.
Stanisław Hożyń |
II |
| Projekt i implementacja aplikacji do detekcji uszkodzeń elementów mechanicznych na obrazach wizyjnych z wykorzystaniem sztucznych sieci neuronowych. |
dr inż.
Stanisław Hożyń |
II |
| Laboratoryjne stanowisko pomiaru dokładności i powtarzalności robota KAWASAKI za pomocą wybranej metody pomiaru odchyłek pozycjonowania |
prof. dr hab. inż. Zygmunt Kitowski |
I |
| Zastosowanie kwaternionów do opisu dynamiki ruchu pojazdu podwodnego |
prof. dr hab. inż. Zygmunt Kitowski |
I |
| Projekt i wykonanie miniaturowego pojazdu nawodno-podwodnego |
prof. dr hab. inż. Zygmunt Kitowski |
I |
| Laboratoryjne stanowisko pomiaru dokładności i powtarzalności robota EPSON za pomocą wybranej metody pomiaru odchyłek pozycjonowania |
prof. dr hab. inż. Zygmunt Kitowski |
I |
| Projekt i wykonanie systemu mikroprocesorowego nadzorującego strefy bezpieczeństwa robota Kawasaki. |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
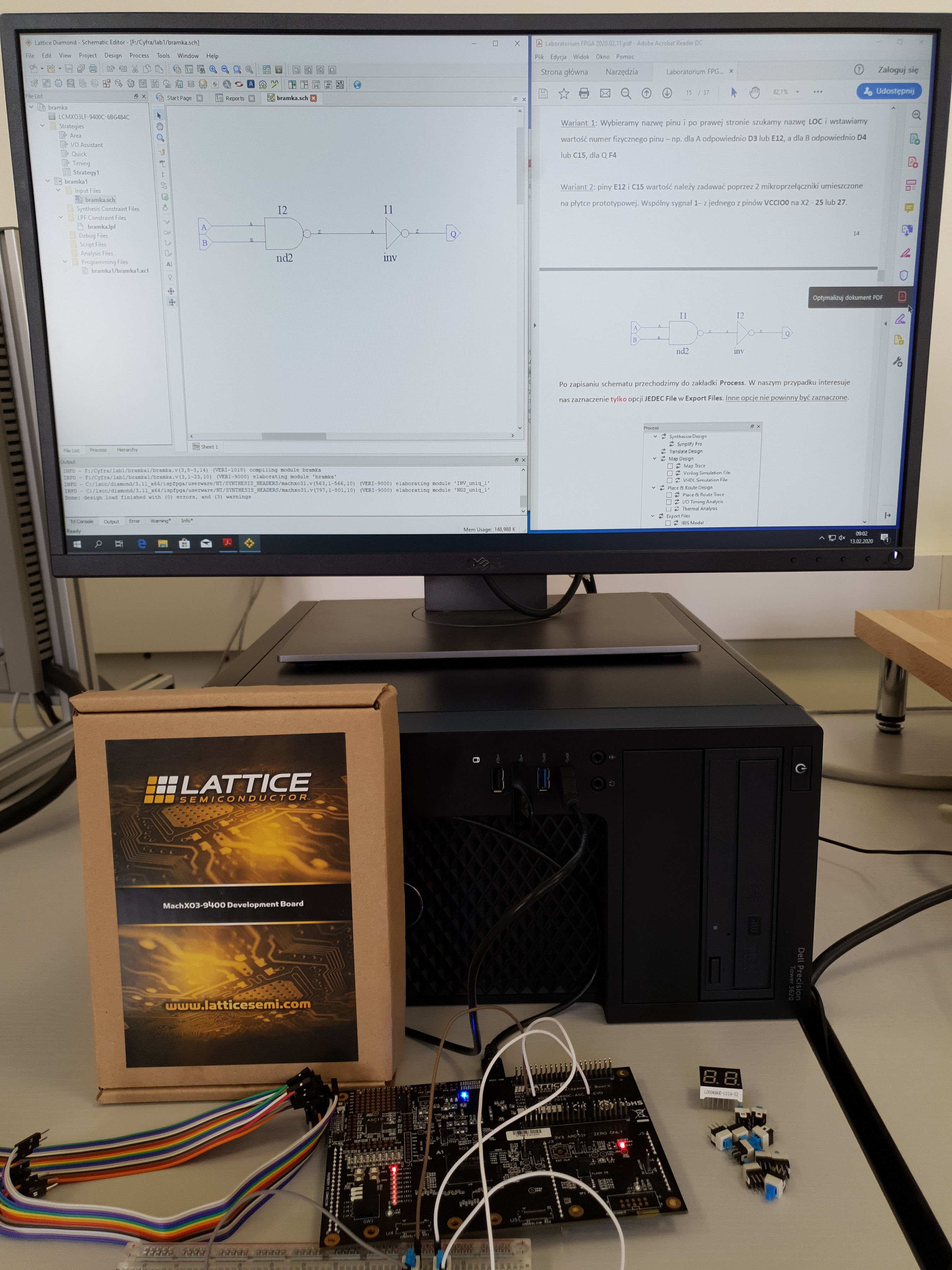
| Projekt i wykonanie cyfrowego (FPGA) rozszerzenia systemu mikroprocesorowego nadzorującego strefy bezpieczeństwa robota EPSON. |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
| Projekt i wykonanie cyfrowego (FPGA) rozszerzenia systemu mikroprocesorowego nadzorującego strefy bezpieczeństwa robota Kawasaki. |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
| Projekt i wykonanie cyfrowego (FPGA) rozszerzenia systemu mikroprocesorowego rejestracji energii pobieranej z akumulatora. |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
| Projekt i wykonanie cyfrowego (FPGA) sterownika silnika krokowego. |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
| Sterownik chwytaka dwufunkcyjnego dla robota Epson/Kawasaki |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
| Sterownik chwytaka elementów delikatnych/szklanych dla robota Epson/Kawasaki |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
| Projekt i wykonanie mikroprocesorowego sterownika systemu inteligentnego budynku w oparciu o sieć WiFi/LAN |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
| Projekt i wykonanie mikroprocesorowego serwera danych dla systemu inteligentnego domu |
kmdr por. mgr inż. Tomasz Leszczyński |
I |
| Projekt i wykonanie stanowiska laboratoryjnego do badania wybranych parametrów eksploatacyjnych zasilaczy impulsowych |
dr inż.
Józef Małecki |
I |
| Projekt i wykonanie stanowiska laboratoryjnego do pomiarów wybranych parametrów pola elektromagnetycznego |
dr inż.
Józef Małecki |
I |
| Projekt i wykonanie układu sterowania napędem falowym dla biomimetycznego pojazdu podwodnego. |
kmdr ppor. dr inż.
Paweł Piskur |
I |
| Projekt i wykonanie stanowiska laboratoryjnego do pomiaru prędkości płynu w 3D metodą wizyjną. |
kmdr ppor. dr inż.
Paweł Piskur |
I |
| Projekt i realizacja układu do detekcji i śledzenia wybranego sygnału akustycznego |
kmdr ppor. dr inż.
Paweł Piskur |
I |
Implementacja systemu rozpoznawania obrazów na platformie Jetson TX2. |
kmdr dr hab. inż.
Piotr Szymak |
II |
| Implementacja systemu sterowania robota za pomocą komend głosowych. |
kmdr dr hab. inż.
Piotr Szymak |
II |
| System sterowania i wizualizacji modelu linii montażowej z robotem przemysłowym przy użyciu sterownika PLC i panelu HMI. |
kmdr dr hab. inż.
Piotr Szymak |
I |
|






























































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}